Hi, I'm
Antoine Weill--Duflos
Head of Technology and Applications @ Haply Robotics
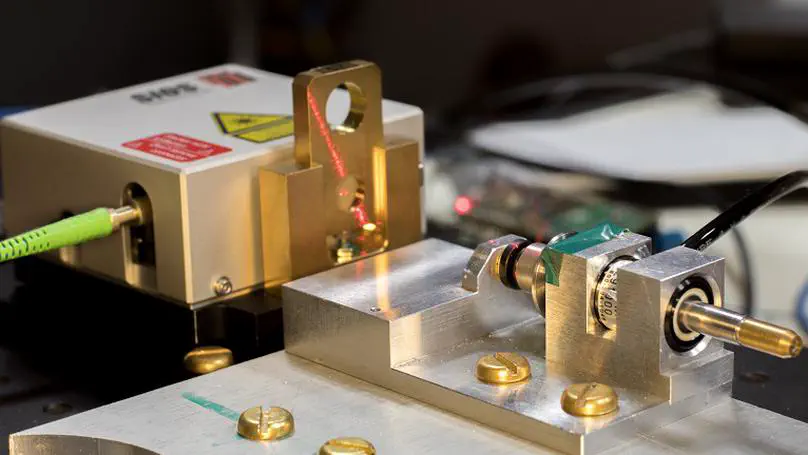
I lead technology and applications at Haply Robotics in Montreal, where we build haptic robots that let people physically feel and interact with the digital world. Our products are used by 150+ customers including Fortune 500s, we have won CES Innovation Awards multiple years running, and we work with some of the biggest names in tech and robotics to push physical AI forward.
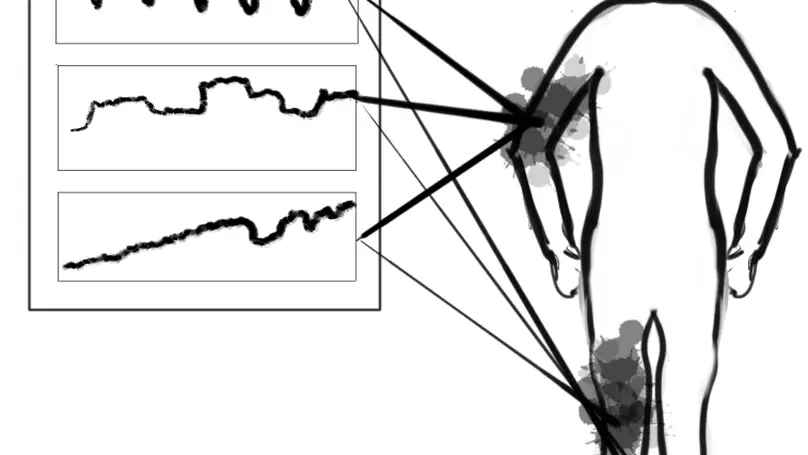
I hold a PhD from Sorbonne Université (Paris) and an engineering degree from Arts et Métiers ParisTech. My research took me from micro and nano teleoperation to haptic device design, perception studies, and human-robot interaction, which eventually brought me to Canada for a postdoc at McGill’s Shared Reality Lab. Along the way, I co-authored a few patents, published a bunch of papers, and I teach haptics, engineering, and human-machine interaction at a few Canadian universities.
Outside of work, I run a self-hosted homelab that I blog about, tinker with home automation and open-source projects, and occasionally build things that have nothing to do with haptics.
Interests
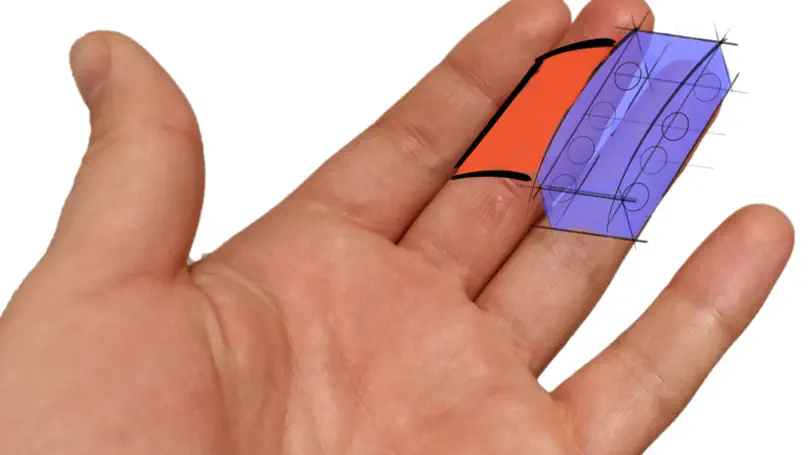
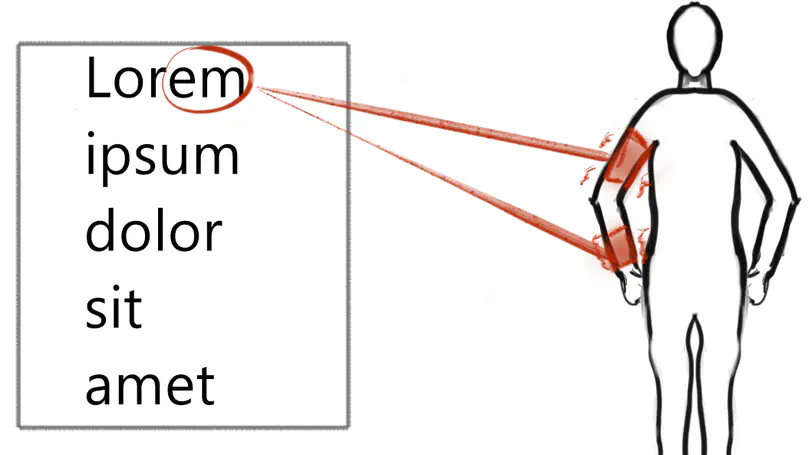
- Haptic perception & devices
- Physical AI & teleoperation
- Self-hosted infrastructure
- Open hardware
Education
-
PhD in Robotics 2017
Sorbonne Université (Paris) -
MSc in Robotics and Advanced Systems 2013
Sorbonne Université (Paris) -
Engineering degree 2013
Arts et Métiers ParisTech (Lille & Paris)
Skills
Tactile rendering, perception, device design
Hardware, control systems, embedded firmware
C/C++, Python, Rust, Java, web
Solidworks, Catia, machining, 3D printing
Docker, GitOps, self-hosting, networking