Why We Have Museums for Optical Illusions but Not for Touch
Touch is one of the first senses we develop, even before birth. It’s deeply intimate, constantly active, and fundamental to how we interact with the world. Yet when you ask people to rank their senses by importance, touch rarely comes first. Vision and hearing dominate the conversation.
This asymmetry shows up everywhere, including in what we teach and what we celebrate.
The gap
In school, we learn about optics: how lenses work, how images form on the retina, how the optic nerve transmits signals to the brain. We learn about the inner ear, sound waves, and the mechanics of hearing. These concepts are well-documented in every science curriculum.
For touch? Almost nothing. How does skin encode pressure, vibration, texture? What are the limits of tactile perception? These questions are barely addressed in standard education.
The cultural gap is even wider. Walk into any bookstore and you’ll find books of optical illusions. Cities around the world have opened museums dedicated to visual tricks and perception games. Optical illusions are entertainment, education, and art, all at once.
Haptic illusions? Most people don’t even know they exist.
Illusions you already know (but can’t explain)
The interesting thing is that many of us have experienced haptic illusions without realizing it. They show up in children’s games:
The crossed fingers trick. In the 90s and 2000s, kids would cross their fingers and touch their nose (or a marble), and the sensation would feel distinctly wrong, as if there were two objects instead of one. This is Aristotle’s illusion, documented for over two thousand years, rediscovered on every playground.
The rabbit hop. More recently, the game involves tapping someone’s arm in two spots and creating the sensation of something hopping between the tapped points, like a small animal running up the arm. This is the cutaneous rabbit illusion, well-studied in perception research.
In both cases, kids experience these phenomena with zero explanation of why they work. The mechanisms remain a mystery to them (and honestly, to most adults too).
Making haptic illusions accessible
Several researchers have asked the same question: how do we democratize haptic illusions the way optical illusions have been democratized?
The most inspiring work in this direction is an article by Vincent Hayward (then at McGill University) that catalogues a series of haptic illusions and demonstrations that can be built from everyday materials. It remains a foundational reference: a practical guide to what to build and how to assemble it.
The problem is that even with simple materials, building these demonstrations requires a certain skill level and motivation. And since most people have never experienced a haptic illusion, they don’t know what they’re trying to build or what the result should feel like.
3D printing changes everything
The rise of affordable FDM 3D printers removed the biggest barrier. Instead of crafting demonstrations by hand from found materials, we can now design precise, reproducible models that anyone can print and assemble.
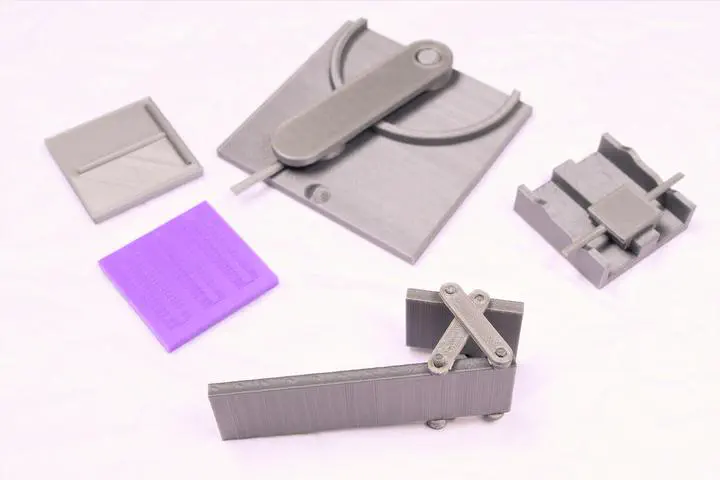
That’s what this project set out to do: create a library of 3D-printable haptic illusion demonstrations, fully open source, that capture the key phenomena in a form anyone can experience.
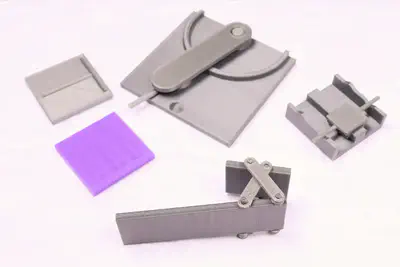
The current library covers six illusions: classic weight, impossible weight, size, fishbone, elevation, and shape. Each one ships with STL files, slicer guidance, and assembly notes so the result is actually reproducible, not just theoretically printable.
Some of these models have already been used in university courses, which was exactly the goal. Making the invisible tangible (literally).
A few illusions worth knowing
The fishbone illusion
A central ridge with small angled ridges on either side, like a fish skeleton. When you run your finger along the center, the vibrations from the angled ridges create the strong sensation of sliding along a groove or channel. There is no groove. It’s entirely created by lateral forces on your fingertip.
First described by Nakatani, Howe and Tachi (2006), the mechanical story is that strips with different frictional or mobility properties create different boundary conditions on the skin, and the somatosensory system tends to interpret those boundary-condition differences as geometry rather than as friction. The tactile system, faced with an ambiguous inverse problem, “prefers” a geometric explanation.
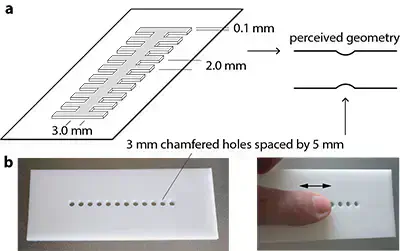
This one has been reproduced on business cards (tiny embossed ridges) and even with layered Post-it notes. It’s simple, robust, and always surprising.
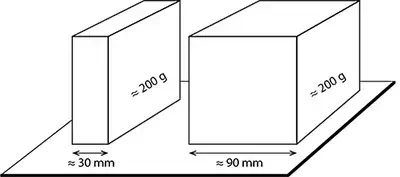
The size-weight illusion (Charpentier’s illusion)
Give someone two objects of identical weight but different sizes. The smaller one will consistently feel heavier. This works visually: you see the sizes, your brain expects the larger one to be heavier, and when it isn’t, the smaller one feels disproportionately heavy.
Charpentier described the effect in 1891 and it has been studied continuously for over a century. The effect is surprisingly large, often 20% or more in judged heaviness, and the leading explanations appeal to prior expectation: lifting an object triggers a predicted force from memory, and any mismatch gets reported as “unexpected” weight. Long enough practice can even invert the illusion (Flanagan, Bittner and Johansson, 2008).
What’s fascinating is that it also works with your eyes closed, purely through touch. If the contact surface area differs between the two objects, your brain still makes the same misjudgment. In our 3D-printed version, we made objects with identical weight but different contact surfaces to isolate the tactile component from the visual one.
Pseudo-haptic illusions
This is my favorite category, and it comes from a beautiful accident. Anatole Lecuyer, during his PhD, had his haptic device break down. Facing a long repair delay, he asked himself: can I create haptic sensations without a haptic device?
The answer, surprisingly, is yes, sort of. By taking a standard mouse and subtly modifying the cursor’s response (accelerating and decelerating it based on position), the visual feedback creates a convincing sensation of texture, bumps, and resistance. You feel something that isn’t physically there.
The best part? Pseudo-haptic illusions need nothing but a regular mouse. No special hardware. That’s the entire point (and the power) of this approach. Lecuyer’s lab used to host a set of browser demos you could try directly, but they no longer appear to be online.
A broader catalog
The 3D-printable collection is just the tip of a much larger iceberg. Hayward’s Scholarpedia article on tactile illusions is a great entry point into the wider field, and it surfaces a handful of effects that are worth knowing about even if they don’t (yet) fit a printable format.
The parchment-skin illusion. Rub your hands together near a microphone and listen to the sound through closed headphones. If the high frequencies are boosted, your skin feels drier and more papery than it actually is (Jousmäki and Hari, 1998). Touch and audition are doing joint inference on surface friction, so changing the acoustic half of the stimulus shifts the felt one.
The velvet hand illusion. Press your two palms together with a wire mesh or a sparse network of thin rods between them, then slide one hand against the other. Instead of feeling the individual wires, most people feel a soft, film-like surface between their hands (Mochiyama et al., 2005; Kawabe et al., 2010). The usual regularity (hands sliding against each other directly produces no strong tactile signal) is violated, and the brain fills in “there must be a thin film there”.
Tactile versions of visual geometrical illusions. The vertical-horizontal illusion, Müller-Lyer, Ponzo, Ebbinghaus and friends mostly still work when the figures are raised and explored by a blindfolded finger (Suzuki and Arashida, 1992). Whatever the brain is doing to generate these geometric distortions is at least partially shared across modalities.
The cutaneous rabbit. Two taps at one location and one at a distant location create the sensation of something hopping along the skin in between (Goldreich, 2007). It is the same “playground game” mentioned earlier, and Bayesian perceptual models reproduce it by assuming the brain favors continuous trajectories in the presence of spatial uncertainty.
The bent-plate illusion. Roll a flat plate around the fingertip so that the only signal the finger receives is the orientation of a rigid surface normal (no curvature, no displacement). Observers reliably report feeling a curved surface (Dostmohamed and Hayward, 2005). A cam mechanism extends this to two-finger exploration of virtual curved objects — the fingers stay at a constant spacing, but the percept is unmistakably of grasping something round. The illusion says something concrete about scale: at fingertip scale, the dominant cue the brain uses to reconstruct curvature is local surface orientation, not displacement or true curvature (Wijntjes et al., 2009).
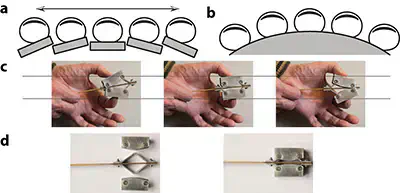
The rolling-ball-in-a-stick illusion. Hold a stick that vibrates with a specific amplitude profile tied to its inclination angle, and you feel a ball rolling back and forth inside it (Yao and Hayward, 2006). The brain has internalized the physics of gravity-driven rolling well enough that a 1D vibration signal is enough to conjure the object.
Pseudo-attraction forces from asymmetric vibration. A small handheld actuator that vibrates with an odd-symmetric acceleration profile produces the strong sensation of being pulled in a specific direction, even though there is no net force on the hand (Amemiya et al., 2005; Amemiya and Gomi, 2014). The asymmetry exploits the somatosensory system’s different tuning to fast vs. slow stimuli.
What these share is that they teach something specific about how the brain infers object properties from ambiguous mechanical inputs. They are not just parlor tricks. They are probes into the forward and inverse models the somatosensory system is running all day long.
What’s next
The project is fully open source. The models need some polish. Early versions leaned too heavily on pure 3D printing when a couple of small magnets here and there would dramatically improve the experience. But the foundation is solid.
The hope is that others will contribute new models, build on the existing ones, and help create a growing library of haptic demonstrations. Maybe someday we’ll have haptic illusion kits you can hand out as conference swag, or a traveling exhibition that does for touch what optical illusion museums do for vision.
We understand our senses by exploring their limits. It’s time touch got the same attention.
The 3D-printed haptic illusion library referenced throughout this post was developed at McGill University’s Shared Reality Lab, in collaboration with Pascal E. Fortin and Jeremy R. Cooperstock. Source files, STLs, and documentation are available at github.com/Shared-Reality-Lab/Haptic-Illusions.
Several of the illusions in the “broader catalog” section are drawn from Vincent Hayward’s Scholarpedia article Tactile illusions (Hayward, V. 2015. Scholarpedia, 10(3):8245), which is the recommended entry point for a deeper survey of the field. Scholarpedia content is licensed CC-BY-NC-SA 3.0.
Antoine Weill--Duflos
Head of Technology and Applications
My research interests include haptic, mechatronics, micro-robotic and hci.